T2T [5], a supervised method based on pixel classification, medial sub-tree generation, and global tree linking components.
Structured Edge (SE) [6], a structured edge detection technique using random forests.
B-COSFIRE [7], selectively responds to vessels by computing the weighted geometric mean of the outputs by applying a pool of Difference-of-Gaussian filters.
LCMBoost [8], an iterative learning-based approach that boosts the performance of an existing base segmentation method.
Performance Statistics:
Table 1: Performance statistics of 2D segmentation using F1 measure (%), Precision (%), Recall (%), Specificity (%) and MCC.
Visual Results:
Figure 1: Exemplar results on segmenting 2D retinal and neuronal images. (a): Input images; (b): Ground-truth; (c): Probability maps of our approach (SF + context distance variant); (d & e) Error images of our approach (SF + context distance & SF only); (f) Error images of Kernel Boost; (f) Error images of SE. Here green denotes false alarm and the magenta denotes the missing error.
SF + context distance: our approach using both structured features and context distance features.
Adaptive Ehancement [9], adaptive image enhancement method specifically designed to improve the signal-to-noise ratio of several types of 3D neuronal and vessel images.
Regression Tubularity [11], which could be considered as an extension of Kernel Boost, formulates the linear structure centreline detection as a regression problem.
Results using F1 measure (%):
SF
SF + context distance
Adaptive Ehancement
GWDT
Regression Tubularity
79.38 ± 9.75
79.89 ± 9.33
58.53 ± 14.27
75.77 ± 10.52
65.75 ± 12.48
Visual Results:
Figure 2: Exemplar 3D neuronal segmentation results on Gold166 dataset. (a & f): Input images with ground-truth in blue; (b & g): Results of our SF + context distance variant; (c & h) Results of Adaptive Enhancement; (d & i) Results of GWDT; (e & j) Results of Regression Tubularity.
Video Illustration:
(b) SF + context distance
(c) Adaptive Enhancement
(d) GWDT
(e) Regression Tubularity
(g) SF + context distance
(h) Adaptive Enhancement
(i) GWDT
(j) Regression Tubularity
Exemplar segmentation results on 3D neuronal images from the
BigNeuron Dataset.
References:
[1] C. Becker, R. Rigamonti, V. Lepetit, and P. Fua. Supervised feature learning for curvilinear structure segmentation. In MICCAI, 2013.
[2] M. Law and A. Chung. Three dimensional curvilinear structure detection using optimally oriented flux. In ECCV, 2008.
[3] P. Bankhead, C. Scholfield, J. McGeown, and T. Curtis. Fast retinal vessel detection and measurement using wavelets and edge location refinement. PLoS ONE, 2012.
[4] A. Frangi, W. Niessen, K. Vincken, and M. Viergever. Multiscale vessel enhancement filtering. In MICCAI, 1998.
[5] S. Basu, A. Aksel, B. Condron, and S. Acton. Tree2Tree: Neuron segmentation for generation of neuronal morphology. In ISBI, 2010.
[6] P. Dollar and C. L. Zitnick. Fast edge detection using structured forests. In IEEE TPAMI, vol 37, no. 8, pp. 1558--1570, 2015.
[7] G. Azzopardi, N. Strisciuglio, M. Vento, N. Petkov. Trainable COSFIRE filters for vessel delineation with application to retinal images. In Medical Image Analysis, vol 19, no. 1, pp. 46--57, 2015.
[8] L. Gu and L. Cheng. Learning to boost filamentary structure segmentation. In ICCV, 2015.
[9] Z. Zhou, S. Sorensen, H. Zeng, M. Hawrylycz, and H. Peng, Adaptive image enhancement for tracing 3D morphologies of neurons and brain vasculatures, Neuroinformatics, vol. 13, no. 2, pp. 153–166, 2015.
[10] H. Xiao and H. Peng, APP2: automatic tracing of 3D neuron morphology based on hierarchical pruning of a gray-weighted image distance-tree, Bioinformatics, vol. 29, no. 11, pp. 1448–54, 2013.
[11] A. Sironi, E. Turetken, V. Lepetit, and P. Fua, Multiscale centerline detection, In IEEE TPAMI, 2016.
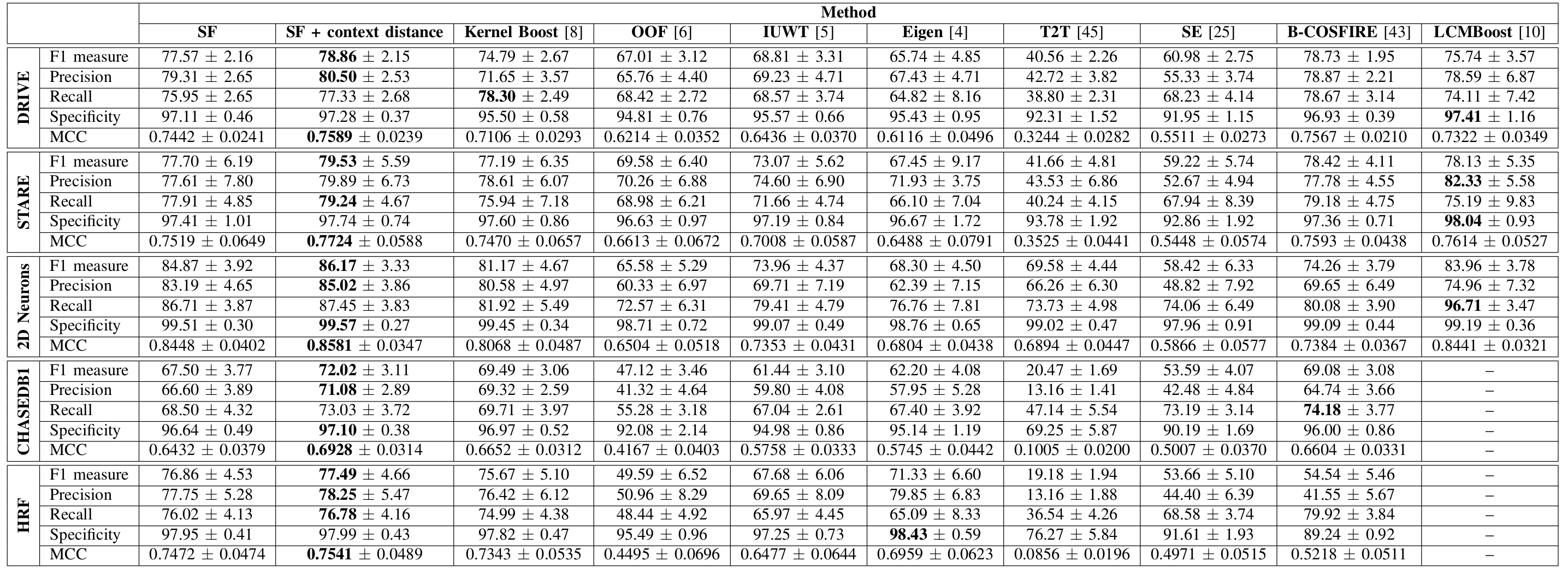
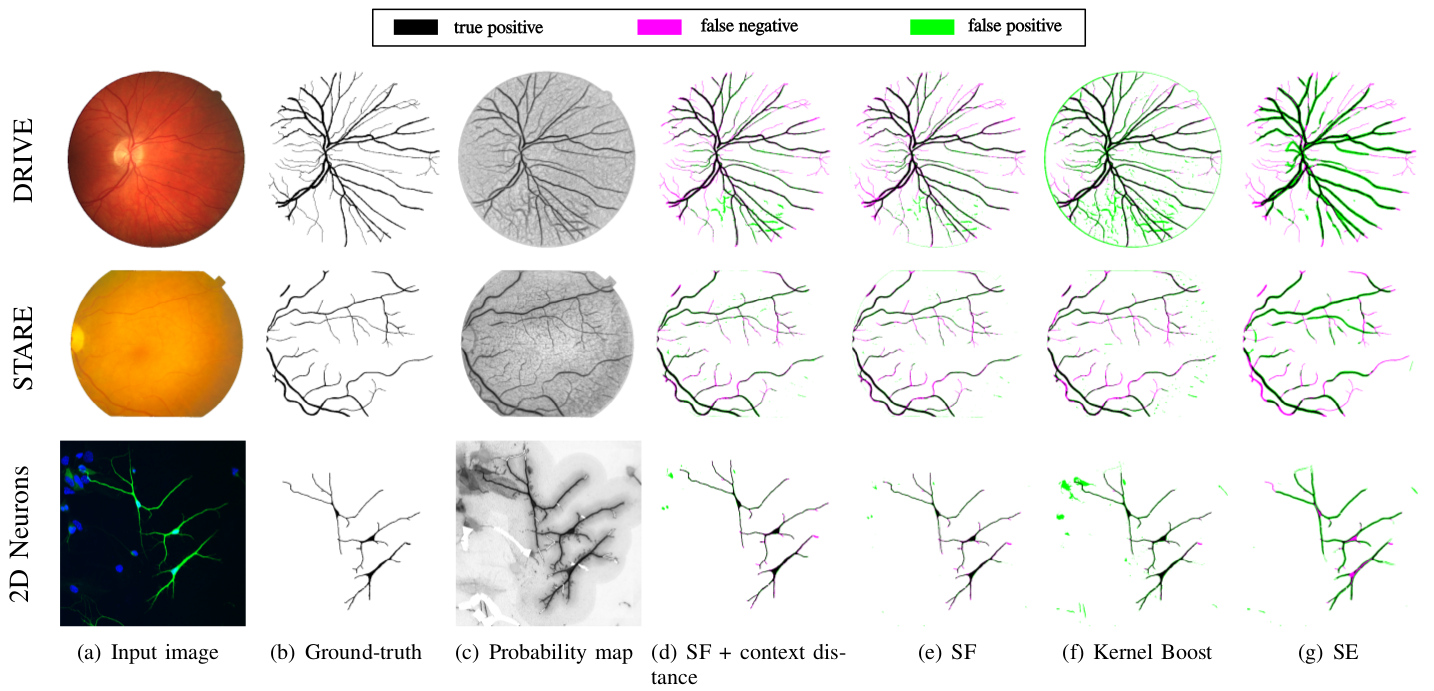 Figure 1: Exemplar results on segmenting 2D retinal and neuronal images. (a): Input images; (b): Ground-truth; (c): Probability maps of our approach (SF + context distance variant); (d & e) Error images of our approach (SF + context distance & SF only); (f) Error images of Kernel Boost; (f) Error images of SE. Here green denotes false alarm and the magenta denotes the missing error.
Figure 1: Exemplar results on segmenting 2D retinal and neuronal images. (a): Input images; (b): Ground-truth; (c): Probability maps of our approach (SF + context distance variant); (d & e) Error images of our approach (SF + context distance & SF only); (f) Error images of Kernel Boost; (f) Error images of SE. Here green denotes false alarm and the magenta denotes the missing error.
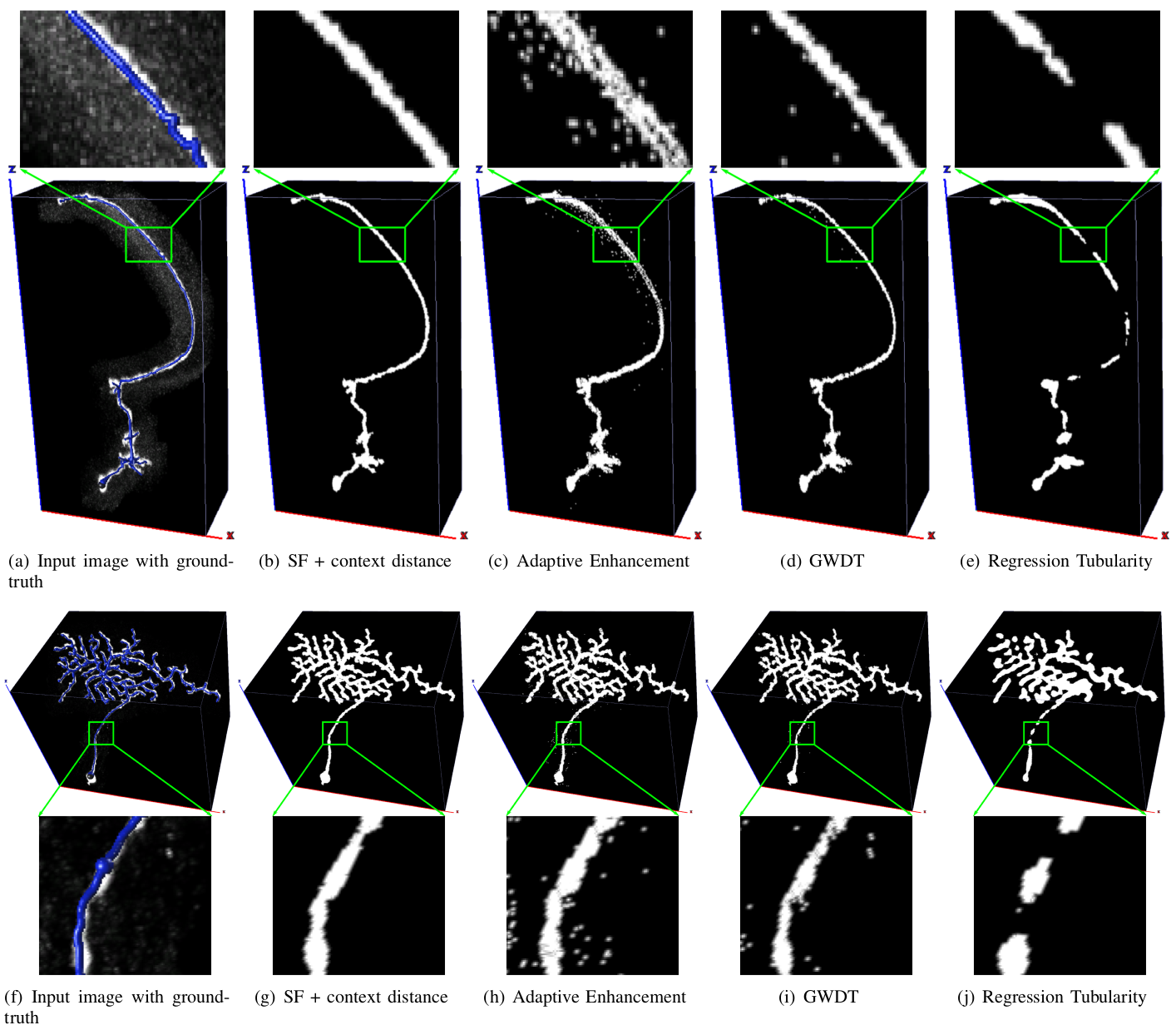 Figure 2: Exemplar 3D neuronal segmentation results on Gold166 dataset. (a & f): Input images with ground-truth in blue; (b & g): Results of our SF + context distance variant; (c & h) Results of Adaptive Enhancement; (d & i) Results of GWDT; (e & j) Results of Regression Tubularity.
Figure 2: Exemplar 3D neuronal segmentation results on Gold166 dataset. (a & f): Input images with ground-truth in blue; (b & g): Results of our SF + context distance variant; (c & h) Results of Adaptive Enhancement; (d & i) Results of GWDT; (e & j) Results of Regression Tubularity.